
JNER:通过新型机器人镜像手疗法增加抓取过程中的运动皮层激活,一项初步fNIRS研究
2022-04-05 网络 网络

中风患者往往会失去运动功能,其中70%以上的人上肢受到影响。尤其是,手部功能受影响最严重,对标准护理疗法的反应也最差。手部运动功能可以通过康复治疗,通过密集和反复练习功能性运动来改善。重复运动训练被认
中风患者往往会失去运动功能,其中70%以上的人上肢受到影响。尤其是,手部功能受影响最严重,对标准护理疗法的反应也最差。手部运动功能可以通过康复治疗,通过密集和反复练习功能性运动来改善。重复运动训练被认为可以改善运动功能,因为它会引起神经可塑性变化,从而在完整的皮层区域构建新的神经网络,取代受损区域的功能。对于有效的康复,在运动和体感皮层周围反复提供神经刺激非常重要。功能恢复后,运动皮质附近的皮质区域的激活水平更高,这可能表明神经可塑性改变。镜子疗法(MT)是一种康复方法,将镜子置于手臂或腿部之间,使非患肢的反射运动产生患肢正常运动的错觉。MT特别用于中风后没有能力进行自愿性运动的个人的康复。已知患肢的对侧运动皮层受到镜像疗法的刺激,尽管没有进行自愿运动。
可穿戴机器人技术可以帮助患有瘫痪和其他运动疾病的人进行肢体运动,可穿戴机器人的使用已经扩展到各种功能任务的康复治疗。最近,许多研究尝试使用可穿戴机器人进行镜像治疗(机器人镜像治疗,RMT)。在RMT中,测量未受影响手的运动或肌肉激活,戴在受影响手上的可穿戴机器人会诱导与测量结果一致的运动。在功能性运动期间,有多种方法可以观察大脑的神经激活。功能性近红外光谱(fNIRS)是其中一种方法,它通过近红外光分析脑血管的血流动力学,从而无创地测量脑激活。运动相关的皮质活动,包括激活的面积和幅度,可以通过在运动皮质周围的头皮上放置多个发光体和探测器,用fNIRS进行量化。之前的研究评估了使用fNIRS的机器人和/或传感手套的有效性,并观察到皮质激活增加。
在本文中,分析了机器翻译、机器人治疗(RT)和RMT在重复挤压运动中的神经效应。此外,还进行了RT测试,以观察在不涉及运动意图时的神经效应。RMT是通过使用定制设计的传感器手套测量未受影响手的运动,并使用软机器人手套诱导受影响手的运动来进行的,该软机器人手套可以帮助我们的研究小组之前开发的4自由度运动。RT通过使用软机器人手套移动受影响的手进行,而不涉及未受影响的手的移动。fNIRS用于测量MT、RT和RMT期间大脑中的神经活动。分析和比较了每种情况对健康受试者和中风幸存者的神经影响。本文发表在《J NeuroEngineering Rehabil》。

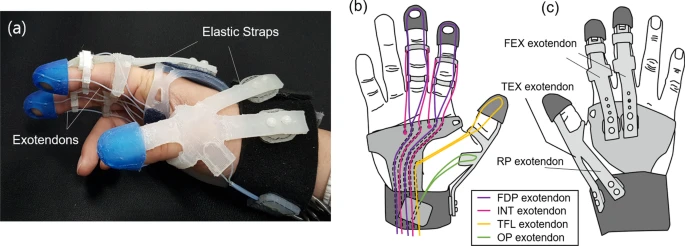
本文使用功能近红外光谱(fNIRS)分析了9名健康受试者和5名慢性中风幸存者在MT、RT和RMT条件下执行任务时双侧运动皮层的激活情况。在MT状态下,患者移动未受影响的手,并在镜子中观察,而受影响的手保持静止。在RT状态下,通过电缆驱动的软机器人手套向受影响的手提供被动运动,而在RMT状态下,通过传感手套测量未受影响手的姿势,软机器人手套反映其在受影响手上的运动。手指伸肌(FEX)外腱和拇指伸肌(TEX)分别通过手指和拇指的背侧,而复位(RP)外腱插入掌指关节(MCP)背侧附近的TEX外腱,并通过手腕的背侧。FEX和TEX外腱分别诱导手指和拇指的伸展,而RP外腱诱导腕掌关节(CMC)的重新定位(伸展和内收的联合运动)。辅助力可以通过用钩环扣件改变被动外腱的拉伸长度来调整。
软机器人手套的设计概述
根据弯曲量改变电阻。弯曲传感器放置在关节的背面,以测量手指和拇指的关节角度。传感器手套测量食指的PIP和MCP关节的弯曲角度,拇指的指间(IP)关节和MCP关节的组合弯曲,以及拇指关节的对立面。对于中风受试者,软机器人手套和传感器手套分别戴在患手和未患手上,而对于健康受试者,软机器人手套和传感器手套分别戴在优势手和非优势手上。受试者坐在椅子上,把手放在桌子上。RT和RMT条件下的实验均在无反射镜的情况下进行。外腱的刚度根据每个个体进行调整,以便受试者能够密切跟踪手用传感器手套进行的捏紧运动。

传感器手套概述和弯曲传感器的位置
每种条件下的实验都以块设计范式进行安排。每个30秒的区块包括20次挤压试验。在捏压试验期间,以0.75秒(1.33赫兹)的间隔提供听觉提示,以指示手的打开和关闭时间。每个捏压块之后是一个持续30秒的休息块。每种情况下,捏压块和休息块重复10次。用食指、中指和拇指尖进行挤压。在静息状态下,受试者被要求放松。在夹持任务中,要求受试者在RT和RMT条件下观察戴软机器人手套的手的运动,并在MT条件下观察未受影响(或非支配)手的镜像。
对于这两组,与其他条件相比,RMT条件下患侧(健康组为非显性)运动皮层对侧的平均皮层激活最大。个体结果表明,与MT和RT条件相比,RMT诱导运动皮层上类似或更大的神经激活。在RMT条件下,两组大脑半球的激活是平衡的。在MT状态下,两组受试者患侧(健康组占优势)手的同侧半球的激活显著增强,而在RT状态下,健康组的对侧半球的激活显著增强。对于中风组和健康组,MT激活了运动皮层的两侧,但在机器人手套的同侧半球观察到了更大的激活,而机器人手套与执行运动的手相反.中风组和健康组,MT激活了运动皮层的两侧,但在机器人手套的同侧半球观察到了更大的激活,而机器人手套与执行运动的手相反.

在RMT条件下的实验中,传感器手套测量的关节角度和驱动软机器人手套的电机的角位移
RMT诱导对侧通道最强的激活。特别是,在RMT的对侧,这是已知的负责手部运动的区域。MT诱导两侧的激活,但同侧半球对机器人手套的激活更强,而机器人手套与执行按压动作的手相反。RT显示对侧半球的初级激活,但其幅度小于RMT。与RT状态相比,RMT状态下的中风幸存者对对对侧大脑半球的激活显著增强,尽管这两种状态都涉及机器人手套移动手。具体而言,与RT相比,RMT在对侧初级运动皮质和对侧躯体感觉皮质上诱导了更大的激活。在健康组中未观察到这种效应。正如预期的那样,由于存在对侧手力矩,与RT相比,中风组和健康组在RMT机器人手套同侧半球的运动皮质激活更大。健康组在RMT条件下对侧初级运动皮质的激活明显高于MT条件,而对侧的激活幅度则高于RT脑卒中组的MT,但在组水平上没有达到显著性(0.1 < P < 0.05)。
通过fNIRS测量的皮质激活来分析MT、RT和RMT对手的神经效应。RMT能够通过拟议的手康复系统进行,该系统根据传感器手套测量的未受影响手(健康受试者的非支配手)的运动,用软机器人手套辅助受影响手(健康受试者的支配手)的4自由度运动。与MT和RT相比,RMT在患手的对侧运动皮质上诱导了更大的激活。通过受试组之间的比较,观察到中风受试者对侧初级运动皮质的激活显著高于仅在RMT条件下的健康受试者,这可能表明结合运动强度、视觉反馈、,而体感反馈对于诱发中风后运动皮层的更大激活非常重要。
实验结果表明,视觉反馈、体感反馈和运动意图相结合,对受影响手的对侧运动皮层产生更大的刺激非常重要。
Kim, D.H., Lee, KD., Bulea, T.C. et al. Increasing motor cortex activation during grasping via novel robotic mirror hand therapy: a pilot fNIRS study. J NeuroEngineering Rehabil 19, 8 (2022). https://doi.org/10.1186/s12984-022-00988-7
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言




#机器人#
51
#机器#
40