
PLAST RECONSTR SURG:机器人辅助腹壁下动脉穿支皮瓣切取术中改良切口的选择提高了手术的可视性和双侧操作的可行性:早期对照队列研究
2023-10-15 MedSci原创 MedSci原创 发表于上海

研究提出一种安全可行的机器人辅助腹壁下动脉穿支皮瓣切取入路,实现双侧腹壁下动脉穿支皮瓣的短腹直肌前鞘切口长度。
为减少供区损伤,有学者建议采用机器人辅助(RA)切取腹壁下动脉穿支(DIEP)皮瓣。RA技术的引入开启了一个新的时代。到目前为止,相关研究很少。有研究者建议皮瓣对侧作为机器人切口,因此,在双侧RA-DIEP获取时,术中需要更换操作孔,增加了操作时间,并可能对腹壁造成损伤。解剖研究中,研究者倾向于机器人切口彼此靠近,在DIEP外的上腹部区域,然而,这种方法会造成额外的瘢痕。目前的机器人手术切口的选择,更倾向于既不需要双侧DIEP通过相同的手术孔切取,也不导致额外的瘢痕。
Plastic and Reconstructive Surgery 最新的一篇研究报告,采用腹腔镜经腹腹膜前入路分离腹壁下动脉和静脉(DIEA/V),在DIEA腹壁皮瓣的脐上和抬高的DIEA腹壁皮瓣的两侧做切口。研究者假设这可以,(1)在不改变切口的情况下切取双侧DIEP皮瓣,(2)减少皮瓣切取部位外的瘢痕,同时提供良好的运动范围,并保持RA-DIEP手术的已知优势,即更短的腹直肌前鞘切口(ARS)和最小的腹直肌牵拉。
采用回顾性对照队列研究方法,比较RA-DIEP与传统DIEP手术。所有患者术前均行ct血管造影探查穿支血管及蒂部走行。研究者利用机器人系统来解剖肌后血管蒂。评估了患者年龄,体质指数,有无吸烟、糖尿病、高血压病史,以及额外的手术时间。测量ARS切口长度。采用视觉模拟评分法进行疼痛评分,评估供区并发症。

共切取13个RA-DIEP皮瓣(单侧11个,双侧2个)和87个常规DIEP皮瓣,无皮瓣失活。双侧DIEP皮瓣在不调整切口的情况下抬起。血管蒂解剖的平均手术时间为53.2±13.4min。RA-DIEP组ARS切口长度为2.67±1.13cm,明显短于传统DIEP组的8.14±1.69cm (P<0.0001)。术后疼痛两组差异无统计学意义(第1天:1.9±0.9比2.9±1.6,P = 0.094;第2天:1.8±1.2比2.3±1.5,P = 0.319;第3天:1.6±0.9比2.0±1.3,P = 0.444)。
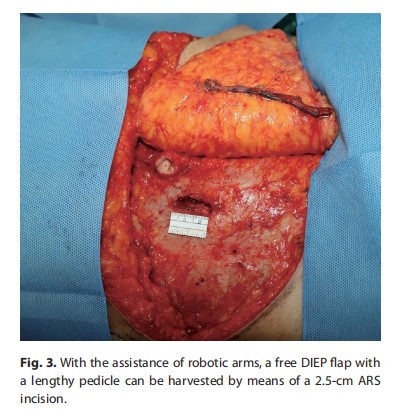
综上,初步结果表明,研究者的RA-DIEP入路是安全的,实现双侧RA-DIEP皮瓣的短ARS切口长度。
原始出处:
Tsai CY, Kim BS, Kuo WL, et al. Novel Port Placement in Robot-Assisted DIEP Flap Harvest Improves Visibility and Bilateral DIEP Access: Early Controlled Cohort Study. Plast Reconstr Surg. 2023;152(4):590e-595e. doi:10.1097/PRS.0000000000010470
 Novel Port Placement in Robot-Assisted DIEP Flap Harvest Improves Visibility and Bilateral DIEP Access Early Controlled Cohort Study.pdf
Novel Port Placement in Robot-Assisted DIEP Flap Harvest Improves Visibility and Bilateral DIEP Access Early Controlled Cohort Study.pdf
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言









