
【协和医学杂志】骨科手术机器人故障分析及应对策略
2024-01-11 协和医学杂志 协和医学杂志 发表于陕西省

本文以期为骨科手术机器人的完善和应用提供科学依据,从而进一步提升骨科手术的安全性和可靠性。
骨科疾病包含多种类型,常呈慢性病程,早期保守治疗效果不明显时可能需手术干预,但传统手术存在创伤大、出血多、并发症发生率高等局限性,而随着人工智能技术的迅猛发展,医工交叉、医工融合发展新态势愈加明显,骨科手术机器人作为一项创新性技术,已引起临床广泛关注。为弥补传统手术的不足,机器人辅助外科手术经过不断完善已成为解决骨科手术难题的重要手段。
机器人辅助技术并非全新概念,早在数十年前,Kwoh等[1]已使用工业机器人辅助完成了脑部活检手术,标志着机器人在外科手术领域的应用具有可行性。此后,Robodoc[2-3]、CASPAR[4]、Acrobot Sculptor[5]等众多机器人系统相继问世并在骨科手术领域取得了一系列令人瞩目的进展。
以Robodoc为代表的早期手术机器人系统多以工业机器人为基础,应用初期在外科手术中实现了自主定位和操作功能,但出于安全性考虑,其临床应用受到限制。新一代骨科手术机器人产品普遍采用了6轴通用机器人构型,结合人机协同控制技术,既具备主动定位功能,同时允许医生通过“hand-on”方式参与手术操作,这些新技术具有更高的精度、灵活性及安全性,为骨科手术领域带来了全新选择。
在提供诸多便利的同时,骨科手术机器人亦面临一系列潜在的失效风险,并可能对手术质量及患者安全造成严重影响,故进行系统性失效分析显得尤为重要[6]。既往虽已有骨科手术机器人故障风险分析相关研究发表[7-8],但近年来骨科手术机器人技术发展迅速,新式骨科手术机器人的系统组成和功能构架相对于早期产品已发生显著变化,各种潜在故障风险需重新进行深入分析。
本文基于对国产骨科机器人设计开发人员、临床使用医生、临床技术支持人员及设备维修人员问卷调查数据,采用失效模式与影响分析(FMEA)方法,从严重程度、发生概率和探测度等角度对骨科手术机器人的18项故障进行了风险优先指数分析,并综合研发企业和临床使用者评分,对故障的风险级别进行识别和排序,以期为骨科手术机器人的完善和应用提供科学依据,从而进一步提升骨科手术的安全性和可靠性。
1 骨科手术机器人系统组成
骨科手术机器人集多项现代化高科技手段于一体,其为一个综合性医疗设备,由多个关键部分组成,核心部件包括机械臂、光学相机、跟踪器、末端工具等(图1),其中机械臂、光学相机对骨科手术机器人性能的实现至关重要。

图1 骨科手术机器人的核心部件
A.机械臂; B.光学相机;C.跟踪器;D.末端工具;E.电源控制系统;F.工作站与软件系统
机械臂是骨科手术机器人的核心组成部分,具有多自由度运动的能力,其通过精确的定位和运动控制,可实现对末端工具进行准确操控、对医生进行高效手术引导。机械臂的高精度运动使得医生可在微创的情况下精准完成复杂的手术操作,有助于减少手术创伤和术后恢复时间。
光学相机采用了空间立体定向技术,通过固定于患者或末端工具上的跟踪器,可实时捕捉患者或末端工具的空间位置与状态,是骨科手术机器人实现预期功能的关键部件。
跟踪器可实时追踪患者的解剖结构和机器人运行状况,以确保机械臂的精准定位和末端工具的准确操作,并可根据患者移动情况及时进行位姿调整,在保障手术准确性方面发挥重要作用。
末端工具是机器人进行实际手术操作的部分,根据临床需求可分为摆锯、磨钻、开路锥等。机器人通过准确的运动控制将末端工具引导至指定位置,从而进行精细的手术操作。
电源控制系统可为骨科手术机器人提供所需的电力供应,不仅可确保器械各部分正常运行,且可通过电子控制单元对机械臂和其他部件进行精准调控。
工作站与软件系统是医生操作和监控整个手术过程的界面,通过软件系统可实时显示图像、运动控制情况并进行数据处理与分析,进而为手术规划、术中导航、实时监测与记录提供依据,以保障手术安全、顺利进行。
2 骨科手术机器人故障类型及设备失效原因
FMEA是一种系统性风险评估方法,用于识别、评估和减少潜在故障及其对系统性能和安全性造成的影响[9]。
实施步骤通常包括:
|
1 |
识别与分析系统、产品或流程中的潜在故障模式,并为每种故障模式定义严重程度、发生概率和探测度。 |
|
2 |
计算风险优先指数并对故障风险进行排序,以确定故障对系统造成的风险等级。 |
|
3 |
结合故障模式及其风险等级制订相应的控制措施,如优化设计、增加检测手段、加强人员培训等,以降低故障风险。 |
|
4 |
监控和跟踪措施的实施效果,并随时更新FMEA策略以适应新的风险变化。 |
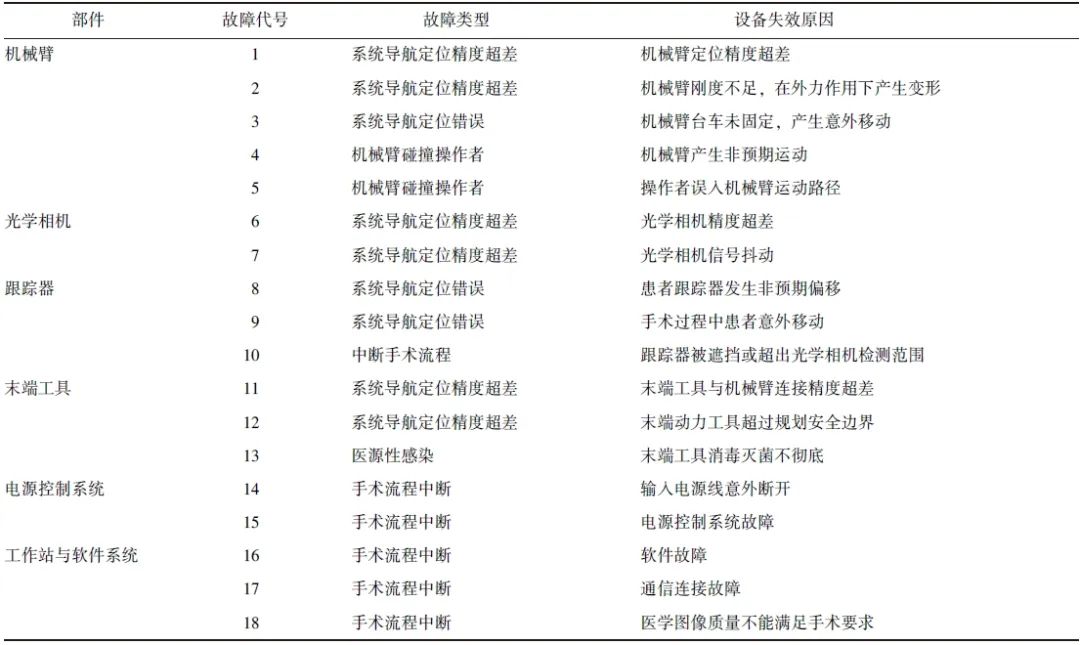
骨科手术机器人研发团队基于研发过程中积累的大量数据和丰富经验,采用FMEA方法总结了适用于骨科手术机器人的故障类型及其产生原因,见表1。
表1 骨科手术机器人故障类型及设备失效原因
3 骨科手术机器人故障风险优先指数差异分析
风险优先指数分析方法是一种用于定量评估潜在故障对系统性能和安全影响力的工具[10-12],其主要目的是确定故障的优先级别,以有利于集中资源应对最具风险的故障模式,并采取适当的控制措施降低故障发生风险,提高系统的可靠性和安全性[13-14]。
风险优先指数分析方法的意义在于通过定量化评估,为各种潜在故障模式赋予一个综合的优先等级,继而有助于故障的精准识别及优先等级排列,以便更有针对性地采取预防性维护、改进设计、加强培训等措施,最终达到最大限度降低系统风险的目的。
为更好地进行骨科机器人故障风险优先指数分析,本研究团队采用基于研发过程、场景观察和专家讨论的方法,全面识别、评估和管理潜在的故障风险,同时以天智航天玑机器人的故障分析为例,对骨科手术机器人产品的典型故障风险进行了量化。
在分析过程中建立了两个由骨科手术机器人领域专家组成的风险优先指数分析小组,即研发工程师组和临床医师组,每组各10人。
研发工程师组由北京天智航医疗科技有限公司的骨科手术机器人研发部构成,团队成员包含设计开发人员4人,设备维修人员2人,临床技术支持人员4人。临床医师组由上海市第六人民医院不同职称的10名骨科医生团队组成(涵盖住院医师至主任医师),团队成员拥有丰富的从业经验和专业知识,具备识别和评估故障风险的能力。
两个评价团队分别可从骨科手术机器人的产品研发和实际临床使用角度出发,结合手术流程,从机械臂操作、光学相机定位、跟踪器监测等环节,全面分析、总结了可能出现的故障情况。
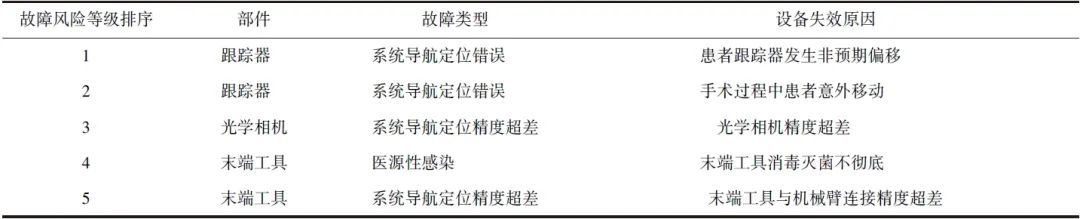
表2、表3分别展示了研发工程师、临床医师认为的骨科手术机器人故障风险等级前5项。其中研发工程师重点关注了跟踪器、末端工具、光学相机、工作站与软件系统4个核心部件,而临床医生则重点关注了跟踪器、光学相机、末端工具3个核心部件。值得注意的是,“患者跟踪器发生非预期偏移”导致的“系统导航定位错误”故障同时被研发工程师、临床医师认为是骨科手术机器人故障风险级别最高项。
表2 研发工程师对骨科手术机器人故障风险等级评价结果前5项
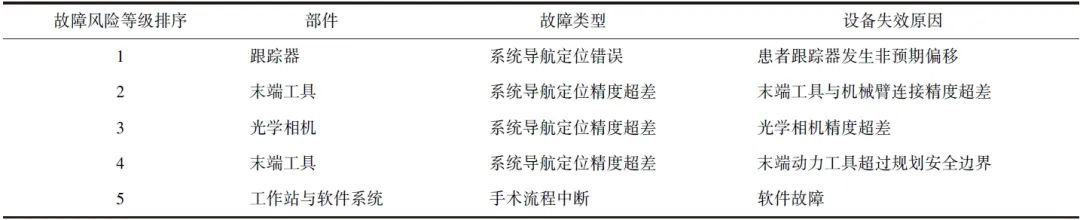
表3 临床医师对骨科手术机器人故障风险等级评价结果前5项
4 高风险故障应对策略
“患者跟踪器发生非预期偏移”导致的“系统导航定位错误”、“末端工具与机械臂连接精度超差”导致的“系统导航定位精度超差”、“光学相机精度超差”导致的“系统导航定位精度超差”、“末端动力工具超过规划安全边界”导致的“系统导航定位精度超差”、“软件故障”导致的“手术流程中断”为研发工程师认为最具风险的骨科手术机器人故障。鉴于研发工程师对故障的认知度更深且组内共识度更高,故笔者针对此5种高风险故障,提出了应对策略。
4.1“患者跟踪器发生非预期偏移”导致的“系统导航定位错误”故障
为避免“患者跟踪器发生非预期偏移”导致的“系统导航定位错误”故障,提高骨科手术机器人在临床应用中的可靠性,降低因非预期患者跟踪器偏移导致的系统导航定位错误风险,建议:
|
1 |
术前进行精确的跟踪器校准,并将其稳定固定于患者体表,以防止被意外移动; |
|
2 |
设立双重检查机制,确保术前跟踪器位置正确; |
|
3 |
引入实时监测系统,以便术中追踪跟踪器位置,并在发现非预期偏移时及时发出警报或暂停手术; |
|
4 |
设计适用于不同部位的固定装置,防止跟踪器在手术过程中发生移动; |
|
5 |
加强操作人员培训,确保其术中操作步骤正确; |
|
6 |
对设备使用情况进行记录和分析,定期检查数据以便早期发现问题并采取改进措施。 |
4.2 “末端工具与机械臂连接精度超差”导致的“系统导航定位精度超差”故障
提升末端工具与机械臂连接的准确性和稳定性是避免因“末端工具与机械臂连接精度超差”所致“系统导航定位精度超差”故障的有效途径,具体措施如下:
|
1 |
优化连接设计,确保机械臂与末端工具之间的接口具有良好的匹配性,以最大程度减小连接误差; |
|
2 |
使用高精度的连接部件和紧固件,确保连接处牢固、不易松动,同时采用先进的连接技术,如夹紧机构或自锁连接,以增强连接部位的稳定性; |
|
3 |
进行精密的校准和调试,确保连接部位符合预定要求; |
|
4 |
加强操作人员培训,确保其连接操作正确; |
|
5 |
定期检查连接部件磨损情况,并及时更换损坏的部件; |
|
6 |
必要时可引入实时监测系统,连续追踪末端工具与机械臂的连接状态,以便及时发现异常并采取纠正措施。 |
4.3 “光学相机精度超差”导致的“系统导航定位精度超差”故障
提升光学相机的准确性和稳定性是避免“光学相机精度超差”导致的“系统导航定位精度超差”的有力措施,包括:
|
1 |
选择高质量、高分辨率光学相机,并确保其工作环境温度稳定、湿度适宜; |
|
2 |
定期进行精度检验和标定,以保证其符合预期性能; |
|
3 |
在安装过程中确保光学相机的位置和角度符合机器人系统要求,在转运和使用过程中避免光学相机发生碰撞与损坏; |
|
4 |
加强操作人员培训,确保其熟练掌握操作光学相机的正确方法,并注意相机性能的监测; |
|
5 |
必要时可引入实时监测系统,以监测光学相机工作状态。 |
4.4 “末端动力工具超过规划安全边界”导致的“系统导航定位精度超差”故障
从临床使用角度出发,为避免“末端动力工具超过规划安全边界”导致的“系统导航定位精度超差”故障,可采取以下措施:
|
1 |
每次手术前,操作人员应仔细检查机械臂和末端工具的状态,确保无损坏或松动; |
|
2 |
根据手术类型和需求选择合适的末端工具,确保其处于机械臂安全范围内且尖端位置和运动范围符合安全边界; |
|
3 |
手术过程中,操作人员需持续监控机械臂和末端动力工具运动状态,如有异常应立即停止操作(设立紧急停止操作按钮)并采取紧急措施; |
|
4 |
加强操作人员培训,确保其熟悉机械臂原理和操作技能,以及出现紧急情况时的处理方法; |
|
5 |
作好定期维护和维修,确保机械臂和末端动力工具的正常运行和操作精准性。 |
4.5 “软件故障”导致的“手术流程中断”故障
对于临床而言,为避免“软件故障”导致的“手术流程中断”故障,以下方法可供参考:
|
1 |
操作人员在术前应确保所有相关软件进行了更新和升级(软件更新前,应对原有版本数据进行备份),并通过了严格的测试; |
|
2 |
加强操作人员培训,确保其熟知软件的各项功能和操作流程,以便出现异常时快速应对,同时操作人员术中应密切关注软件运行状态,如有异常应立即停止操作并联系技术人员,迅速启动应急计划,紧急处理软件故障,包括切换至备用软件系统或手动操作方案; |
|
3 |
及时获取软件支持和更新信息,以预防潜在问题的发生; |
|
4 |
建立软件故障记录和反馈机制,为后续软件改进和优化提供参考。 |
5 小结
骨科手术机器人凭借极高的操作稳定性和精确性,在减少临床医师射线暴露的同时,使手术更加微创、安全、高效,在临床具有极好的应用前景,但一系列器械故障对手术质量和患者安全造成了潜在的不良影响。
笔者对骨科机器人常见的故障风险及设备失效原因进行了梳理,并结合骨科机器人设计开发人员、临床使用医生、临床技术支持人员、设备维修人员对该类器械的故障分析数据,基于FMEA分析方法,从研发企业和临床使用者角度,计算了18项故障的风险优先指数,以辅助高风险故障的筛查。
为进一步提高骨科手术机器人的可靠性,针对高风险故障,从操作人员、机器、使用方法和环境等角度提出了多方面应对策略,包括精确校准跟踪器、引入实时监测系统导航、优化连接部位设计、使用高精度部件、加强操作人员培训等,以确保手术的安全和顺利进行,并为骨科手术机器人的故障管理和优化提供了有益参考和指导。
参考文献
[1]Kwoh YS, Hou J, Jonckheere EA, et al. A robot with improved absolute positioning accuracy for CT guided stereo-tactic brain surgery[J]. IEEE Trans Biomed Eng, 1988,35:153-160.
[2]Pransky J. ROBODOC-surgical robot success story[J]. Ind Robot,1997,24:231-233.
[3]Schulz AP, Seide K, Queitsch C, et al. Results of total hip replacement using the Robodoc surgical assistant system: clinical outcome and evaluation of complications for 97 procedures[J]. Int J Med Robot Comp, 2007,3:301-306.
[4]Mazoochian F, Pellengahr C, Huber A, et al. Low accuracy of stem implantation in THR using the CASPAR-system anteversion measurements in 10 hips[J]. Acta Orthop, 2004,75: 261-264.
[5]Gomes P. Surgical robotics: Reviewing the past, analysing the present, imagining the future[J]. Robot Cim Int Manuf,2011,27:261-266.
[6]朱嘉伟, 杨雪鹤, 郑晨, 等. 中国有源医疗器械行业可靠性及其审评现状研究[J].生物医学工程学杂志,2022, 39:1050-1058.
[7]Buchs NC, Pugin F, Volonté F, et al. Reliability of robotic system during general surgical procedures in a university hospital[J]. Am J Surg,2014,207:84-88.
[8]Ren Y, Cao S, Wu J, et al. Efficacy and reliability of active robotic-assisted total knee arthroplasty compared with conventional total knee arthroplasty: a systematic review and meta-analysis[J]. Postgrad Med J,2019,95:125-133.
[9]黄健宇. 论 FMEA 的分析与应用[J]. 机械工业标准化与质量,2007(4):37-41.
[10]屈媛媛,王会如,张宏,等.基于FMEA的医疗器械现场检验风险分析[J].医疗卫生装备,2021,42:75-79.
[11]姚萍华,王新连.肺癌根治术体位安置管理中引入失效模式与效应分析的效果[J].临床与病理杂志,2022,42:1423-1429.
[12]Zhang Y, Liu T. Risk assessment based on a STPA-FMEA method: A case study of a sweeping robot[J]. Risk Anal, 2023,43:590-604.
[13]Kim KO, Zuo MJ. General model for the risk priority number in failure mode and effects analysis[J]. Reliab Eng Syst Safe,2018,169:321-329.
[14]Zammori F, Gabbrielli R. ANP/RPN: A multi criteria evaluation of the risk priority number [J]. Qual Reliab Eng Int,2012,28:85-104.
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言










#骨科手术# #机器人故障#
28