JNER:可穿戴机器人可用性评估实践和使用环境分析
2021-12-18 MedSci原创 MedSci原创

用于辅助、支持或增强人类功能和活动的可穿戴机器人设备(WRD)越来越普及和实用。在过去的几十年中,从完全可穿戴的软设备到固定的硬设备,已经发展出了巨大的多样性。尽管如此,由于市场上缺少可用性以及技术接
用于辅助、支持或增强人类功能和活动的可穿戴机器人设备(WRD)越来越普及和实用。在过去的几十年中,从完全可穿戴的软设备到固定的硬设备,已经发展出了巨大的多样性。尽管如此,由于市场上缺少可用性以及技术接受限制,日常使用的WRD数量仍然非常低。更具体地说,可用性定义为“指定用户在指定的使用环境中能够使用系统、产品或服务以实现指定目标的有效性、效率和满意度”——似乎是限制WRD市场翻译和技术接受的关键因素。特别是,用于医疗应用的设备,如机器人辅助治疗或先进辅助技术,往往难以满足复杂的使用环境,因为有健康问题的用户有更具体和个性化的需求。
解决和最小化可用性限制的解决方案是以用户为中心的设计(UCD),其目的是让技术利益相关者参与整个设备开发,以更成功地满足用户需求。作为迭代UCD过程的一部分,解决特定人类问题的技术解决方案的结构化评估被认为是必不可少的。WRD的评价是一个具有挑战性的努力,从技术特征到人为因素有许多方面需要考虑。从技术角度来看,在开发辅助、支持或增强人类活动的机器人时,设备的有效性和安全性至关重要。另一方面,用户自身也将生理和心理社会因素发挥作用,如不同的技能、知识、先前的经验或期望,这些因素需要作为同等重要的设计标准进行调查和评估。不幸的是,对于WRD的复杂人机交互的评估缺乏标准和指南。更具体地说,相关和适当的可用性评估措施的应用仍然是可穿戴机器人发展中的一个基本挑战。最近对WRD评估实践进行分析的研究表明,所使用的措施非常广泛,没有明显的最佳实践。尽管针对具体应用做出了努力,用新的评估框架来解决这些限制,但仍然需要更多关于可穿戴机器人开发和可用性评估最佳实践的通用指南。

在这项工作中,报告了从学术、工业和临床背景发送给WRD开发人员的在线调查的见解,以分析可用性评估的当前实践,考虑使用环境、技术成熟度和用于评估的方法。调查的目的是调查:(1)WRD的特定使用环境是否比其他环境在技术成熟度方面更先进,(2)用户积极参与的可用性评估是否是WRD开发的当前实践,正如UCD所预期的那样,(3)当前可用性评估实践是否主要以设备为中心,即在捕捉用户视角方面受到限制,以及(4)WRD可用性评估的最佳实践是否可以从该领域最常报告的方法和措施中推断出来。本文发表在《J NeuroEngineering Rehabil 》。
本研究的数据是通过使用QuestionPro调查软件(美国德克萨斯州奥斯汀QuestionPro公司)进行的在线调查收集的。该调查主要采用标准化和有效的问题格式以及QuestionPro的标准化问题格式进行设计。基于 ISO 作为术语基本事实的定义,可用性取决于系统使用和研究的环境。为了进一步了解其 WRD 的技术成熟度,受访者被要求指定他们的技术准备水平 (TRL)。九个不同的 TRL 介绍如下,TRL 1 = 观察到的基础研究和原则,TRL 2 = 制定的技术概念,TRL 3 = 概念的实验证明,TRL 4 = 在实验室环境中测试的技术,TRL 5 = 在预期环境中测试的技术,TRL 6 = 在预期环境中验证和演示的技术,TRL 7 = 在操作环境中演示,TRL 8 = 系统完整并准备商业化,TRL 9 = 完整的商业应用。本研究的一个核心兴趣是调查 WRD 的评估实践,受访者被要求选出他们专注于可用性评估的五个属性。
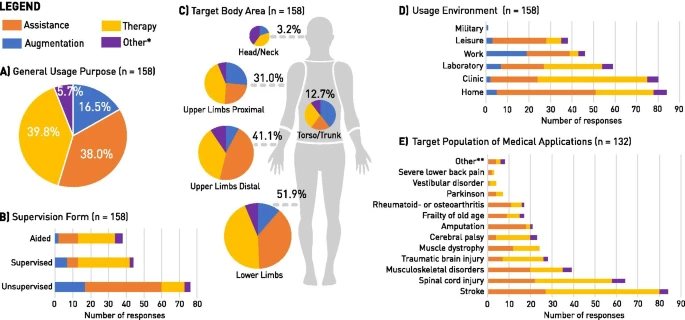
可穿戴机器人设备的使用环境
共收集和分析了来自被调研人员的 158 份问卷。 受访者的背景从学术界 (71.5%) 到工业界 (32.3%) 和临床实践 (15.2%),而 158 位受访者中有 28 位选择了不止一种背景。WRD的一般使用目的分为四类:增强(16.5%)、辅助(38.0%)、治疗(39.8%)、 和其他 (5.7%)。 这四种一般用途的分组用于大多数分析和可视化。当前 WRD 最有针对性的身体区域是下肢(n = 81),其中 82.7% 报告用于医疗应用。虽然增强设备主要专注于工作应用,但辅助 WRD 的目标是在家中、休闲活动期间和临床使用中提供帮助。在 63 种以治疗为导向的设备中,80% 被设计用于诊所,在家中或研究中具有额外的使用意图(均为 42.8%)。在所有报告的 WRD 中,最终用户的家庭似乎是最有针对性的使用环境 (52.5%),其次是诊所 (50.6%) 和实验室 (37.3%) 应用。
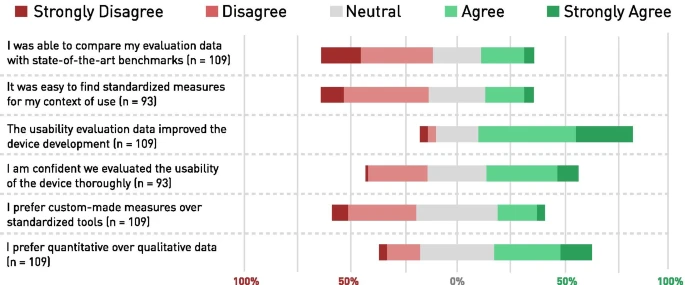
可用性评估实践的思考
机器人辅助治疗和功能性残疾人士的日常援助的应用程序目前构建了 WRD 的最大用例。结合 TRL 信息。与其他使用目的相比,用于日常生活的设备处于相对年轻的成熟状态。机器人辅助治疗总体上似乎更加成熟,有更多的设备接近或已经在市场上销售。在本文收集的样本中,增强设备似乎是 WRD 用例的少数,只有 16.5% 的调查设备旨在例如预防工业应用中与工作相关的肌肉骨骼疾病。大多数报道的增强解决方案旨在支撑躯干(例如,支撑举重任务)或近端上肢(例如,头顶工作)。可以确定 WRD 领域目前最流行的三种使用环境,按照它们当前的技术成熟度和转化为日常使用的成功进行排名:(1) 机器人辅助治疗应用监督(临床或研究)环境中的上肢和下肢,(2) 在工业、无人监督的工作场所中增强劳动密集型任务,以及 (3) 在家庭环境中无人监督、独立使用可穿戴机器人辅助技术。
结果可以作为可穿戴机器人可用性研究的最新比较和建议。 鼓励更平衡、可比较和面向用户的评估实践。
Meyer, J.T., Gassert, R. & Lambercy, O. An analysis of usability evaluation practices and contexts of use in wearable robotics. J NeuroEngineering Rehabil 18, 170 (2021). https://doi.org/10.1186/s12984-021-00963-8
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言










#环境分析#
26
#机器人#
42
#机器#
31